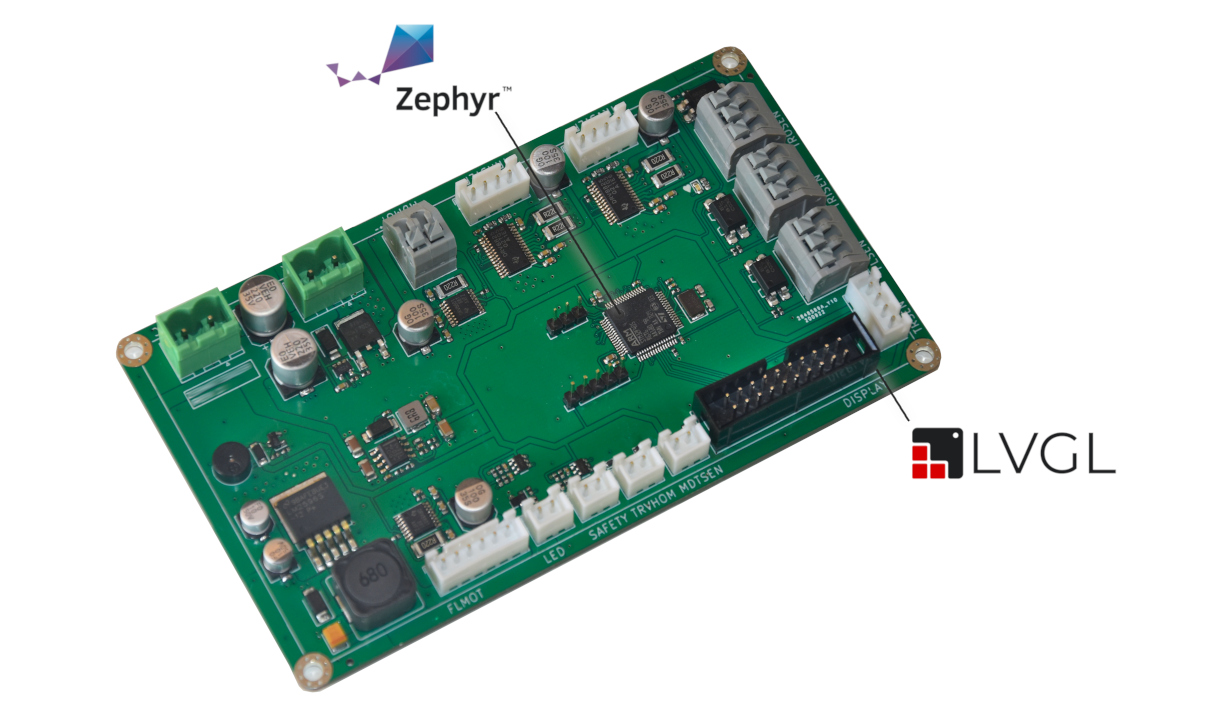
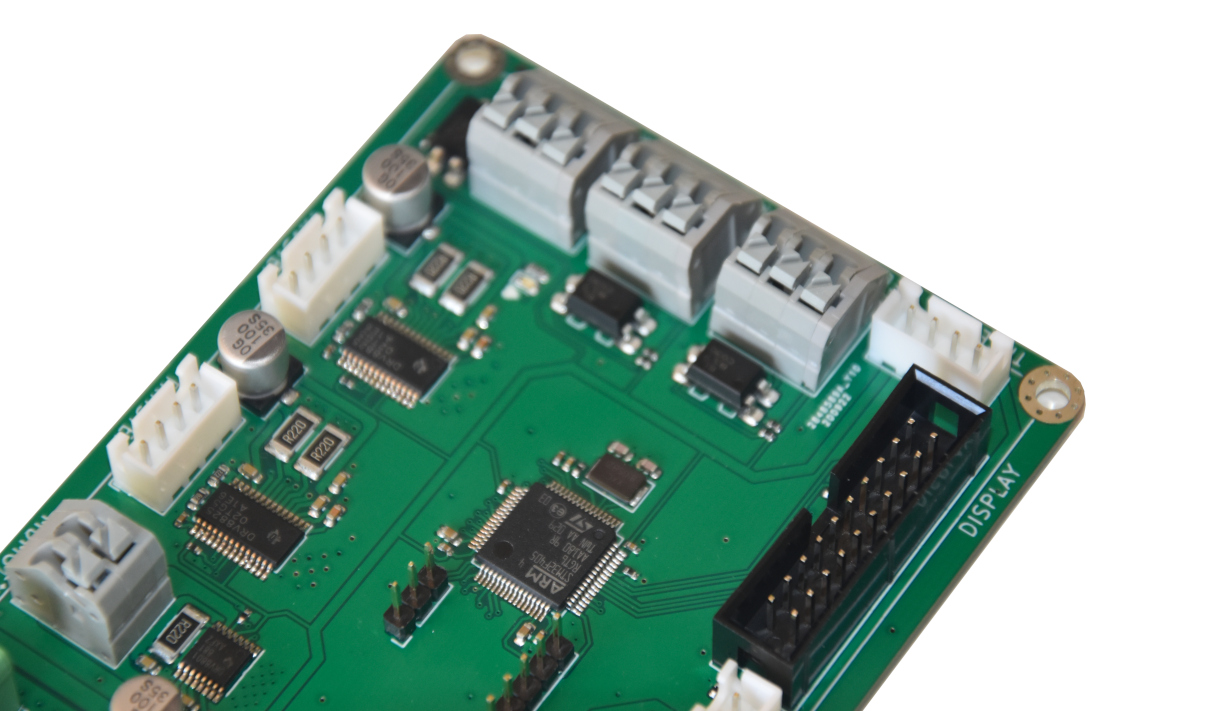
Industrial machine subsystem controller
Design and production of a board to control an industrial machine subsystem for the food processing industry. Some design highlights include: DC and stepper motor controllers, multiple digital and analog monitoring sensors, capacitive touch TFT display. Firmware is powered by Zephyr RTOS and LVGL for touch display content.
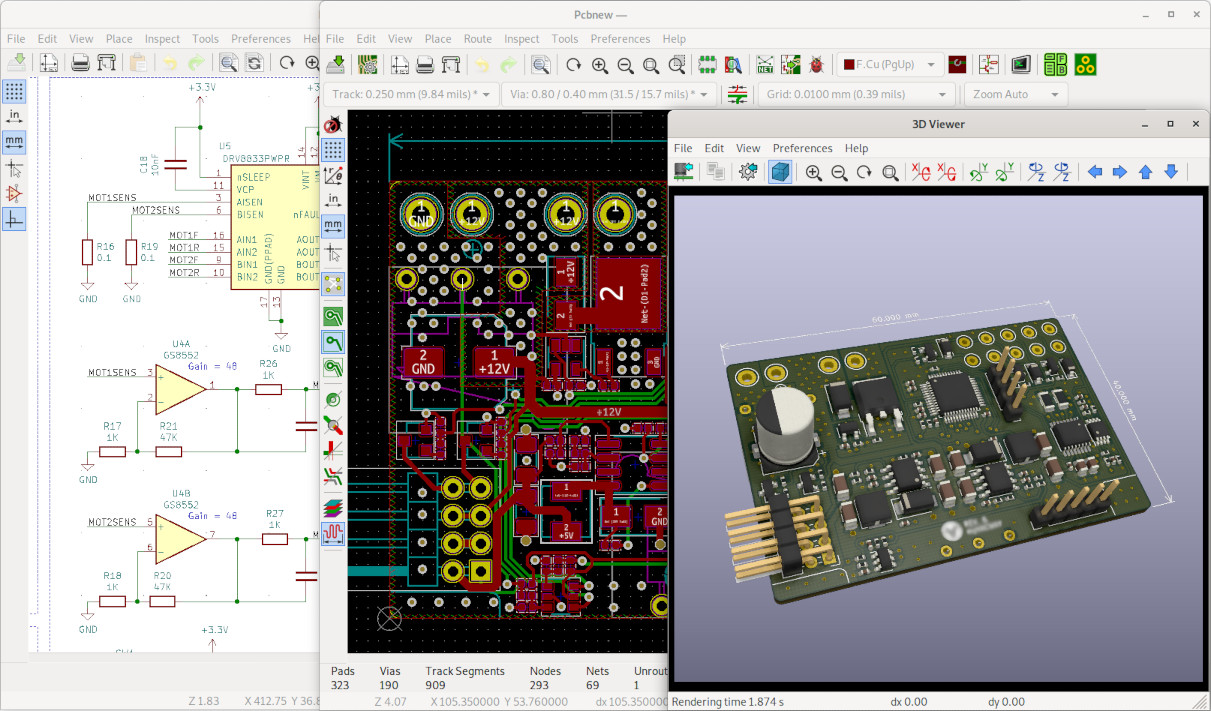
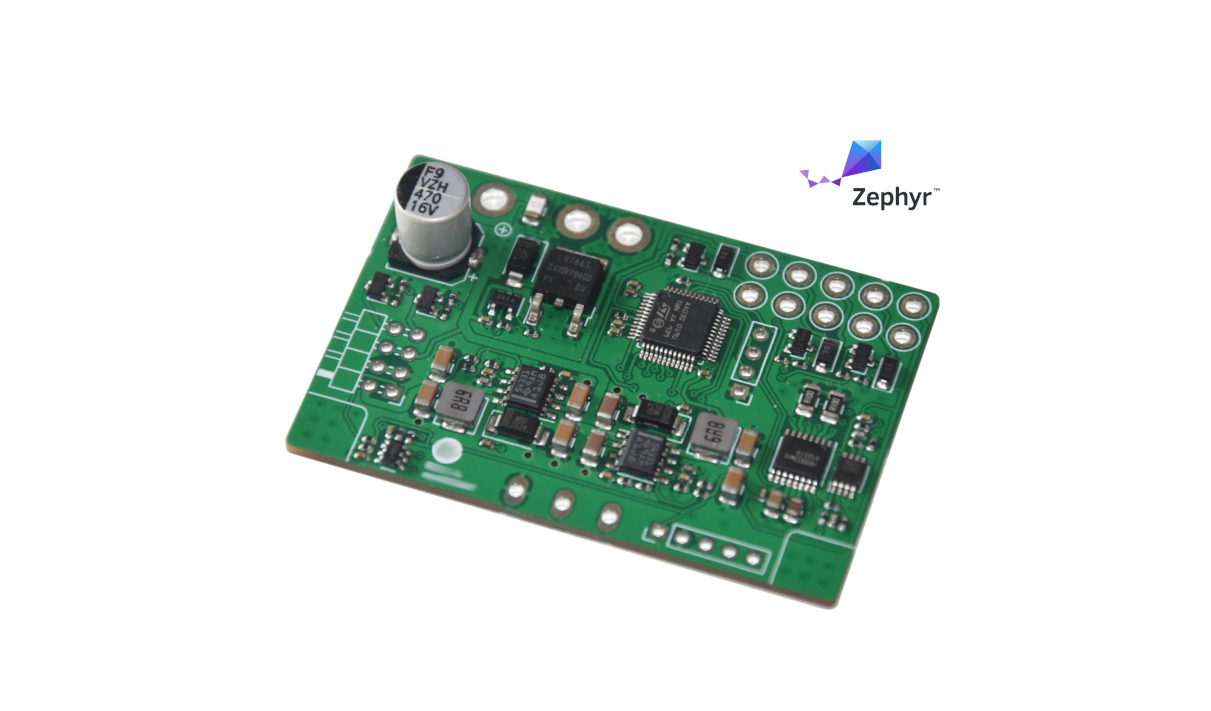
Vacuum and sealing machine controller
Design and production of a board to control vacuum and sealing machines. Some design highlights include: main and auxiliary switching power supplies, sealing control with custom modulation scheme and low \(R_{DSON}\) MOSFET, dual DC motor controller. Firmware is powered by Zephyr RTOS.
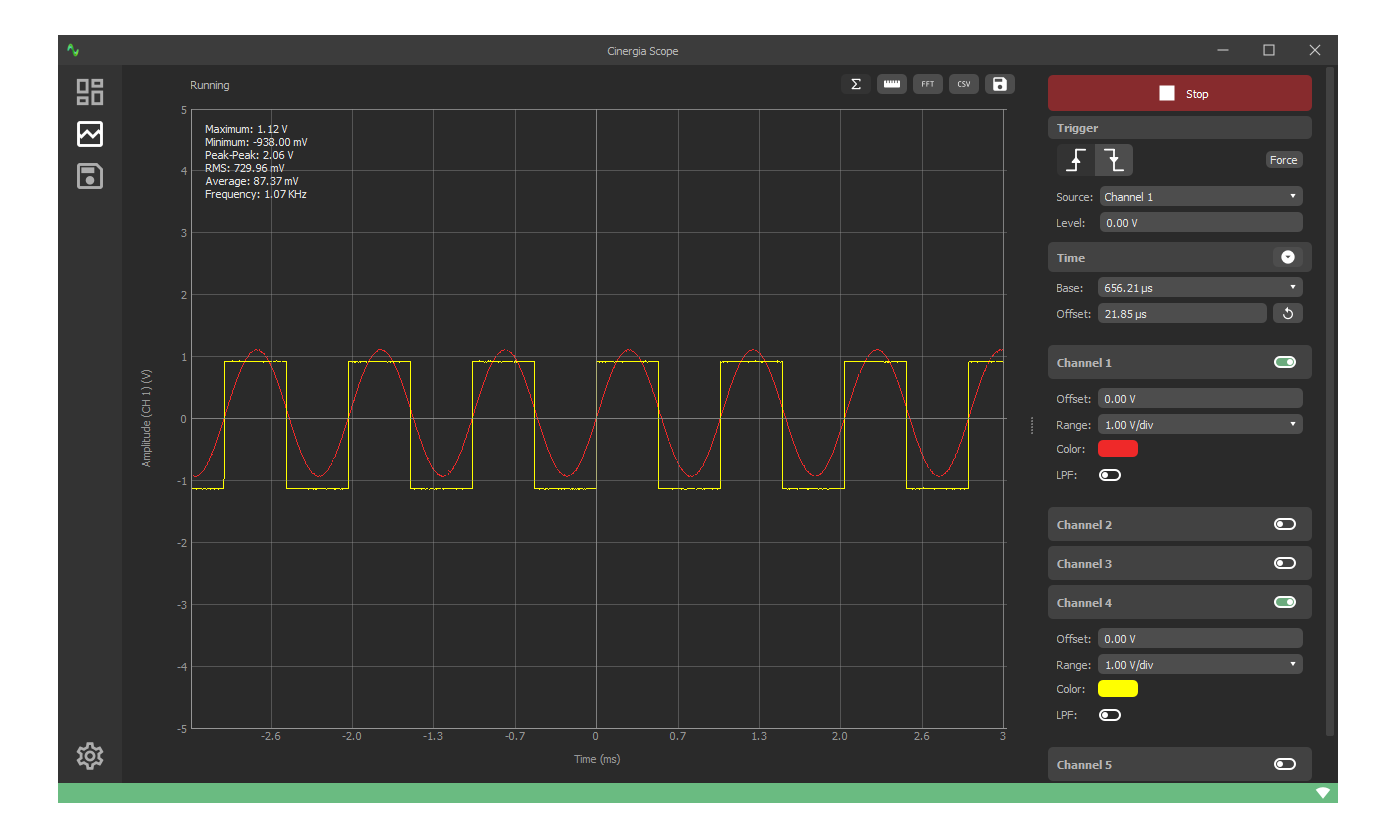
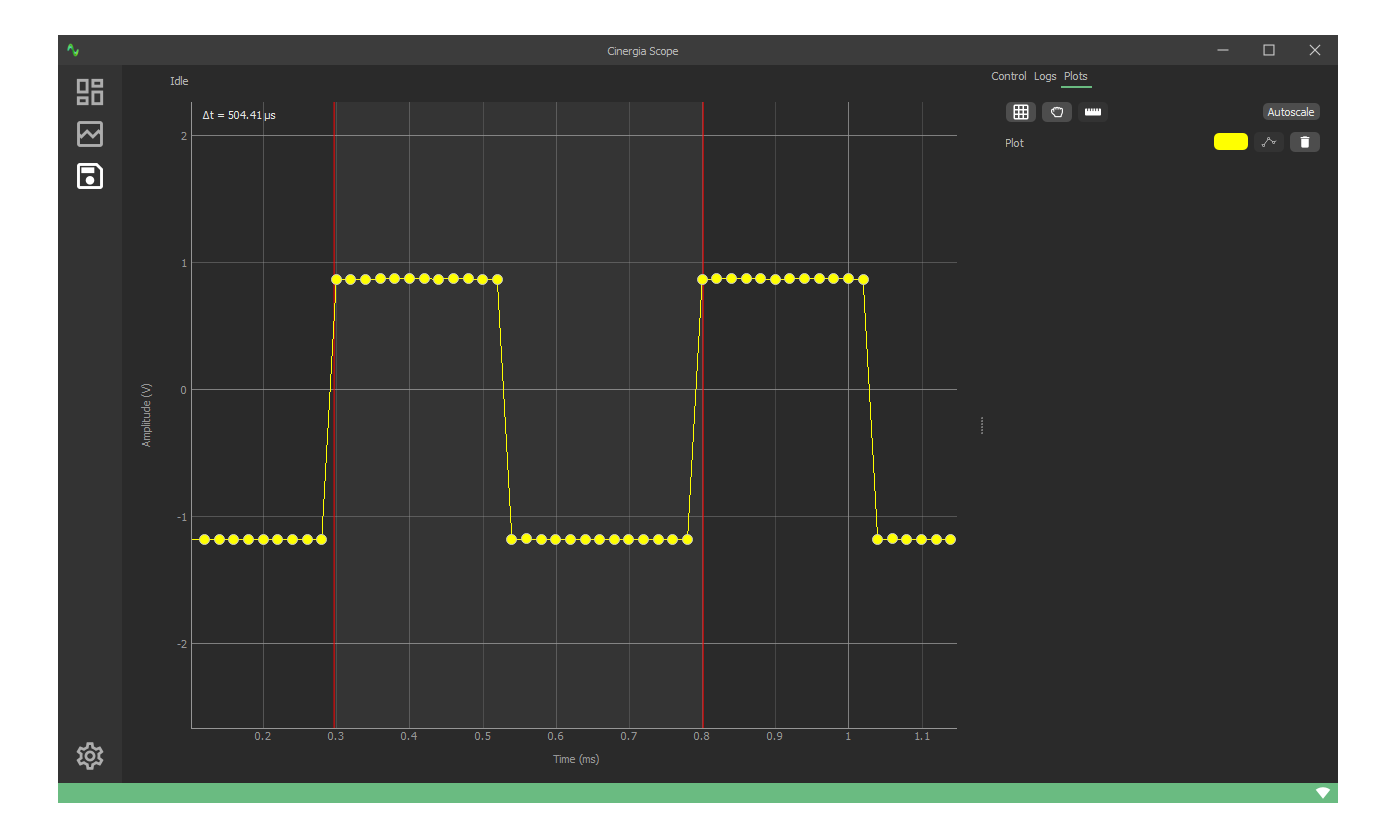
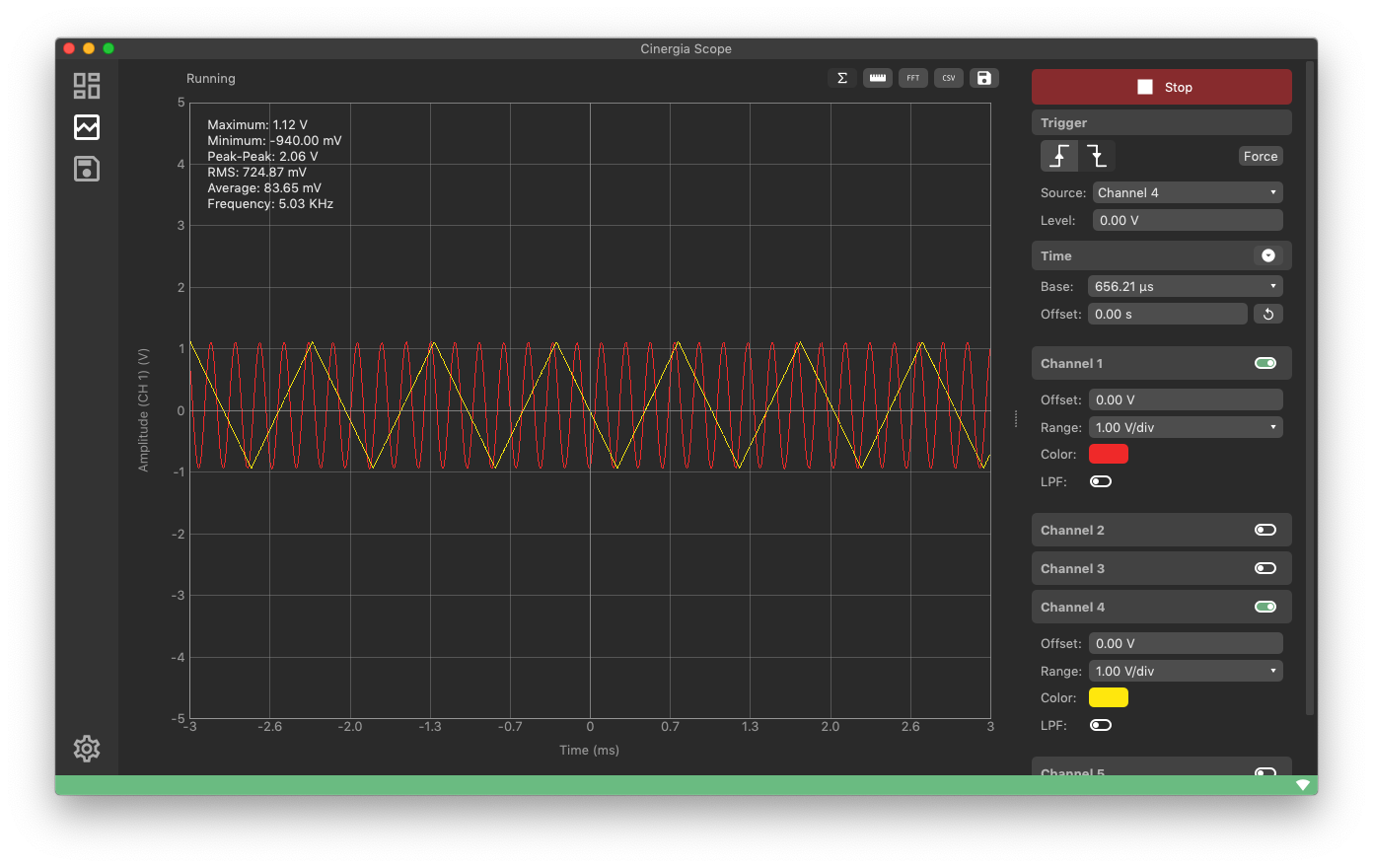
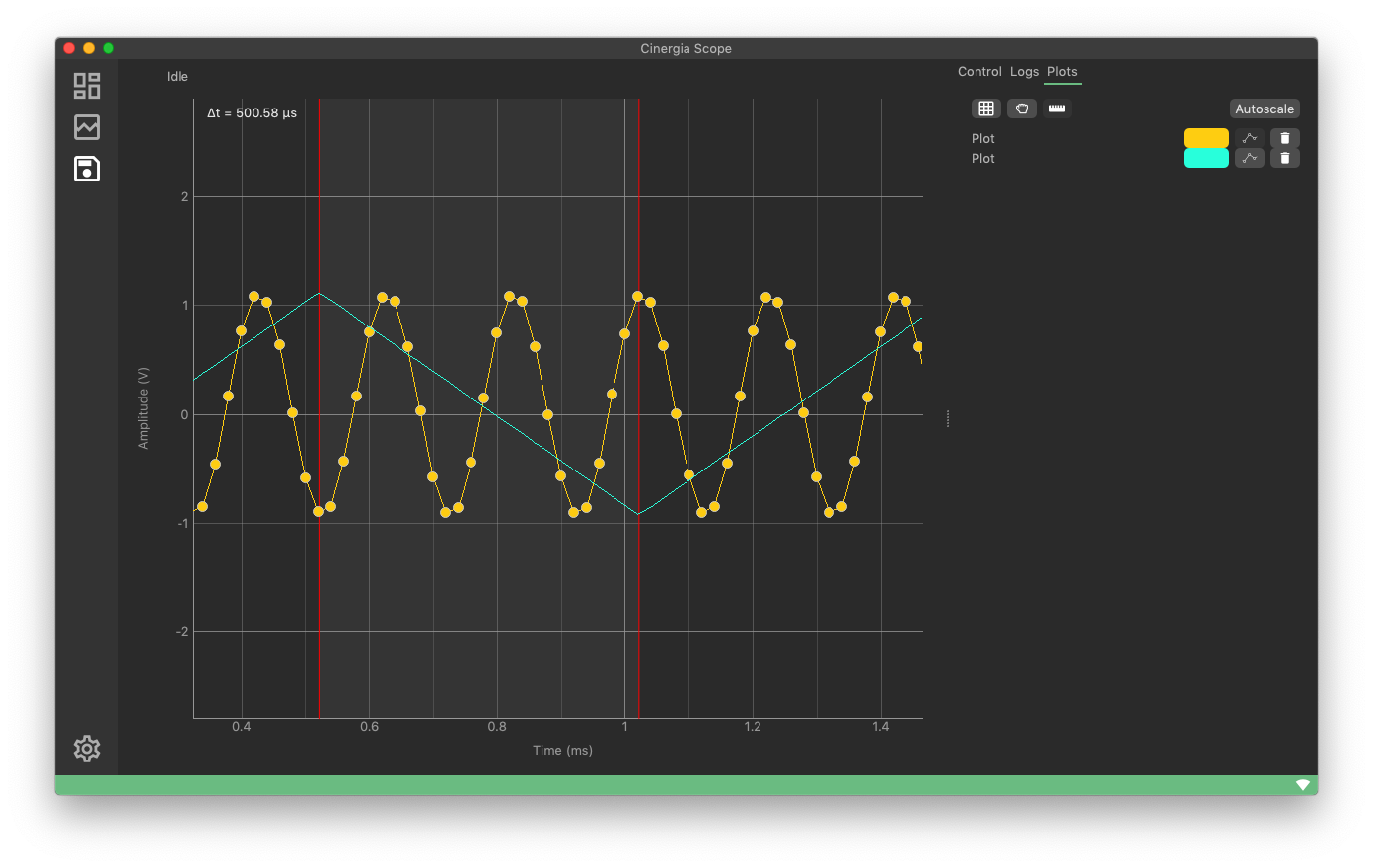
6-Channel Oscilloscope
A 6-channel oscilloscope with standalone datalogger for measuring equipment control signals. Scope server runs on embedded Linux and client is a multiplatform application for real-time visualization and data analysis.
Navigation algorithm and IMU calibration
Development of a navigation algorithm using GPS and IMU attitude information. Calibration algorithms for IMU sensors (accelerometer and magnetometer) in order to achieve accurate navigation performance. Application: swimming wearables.

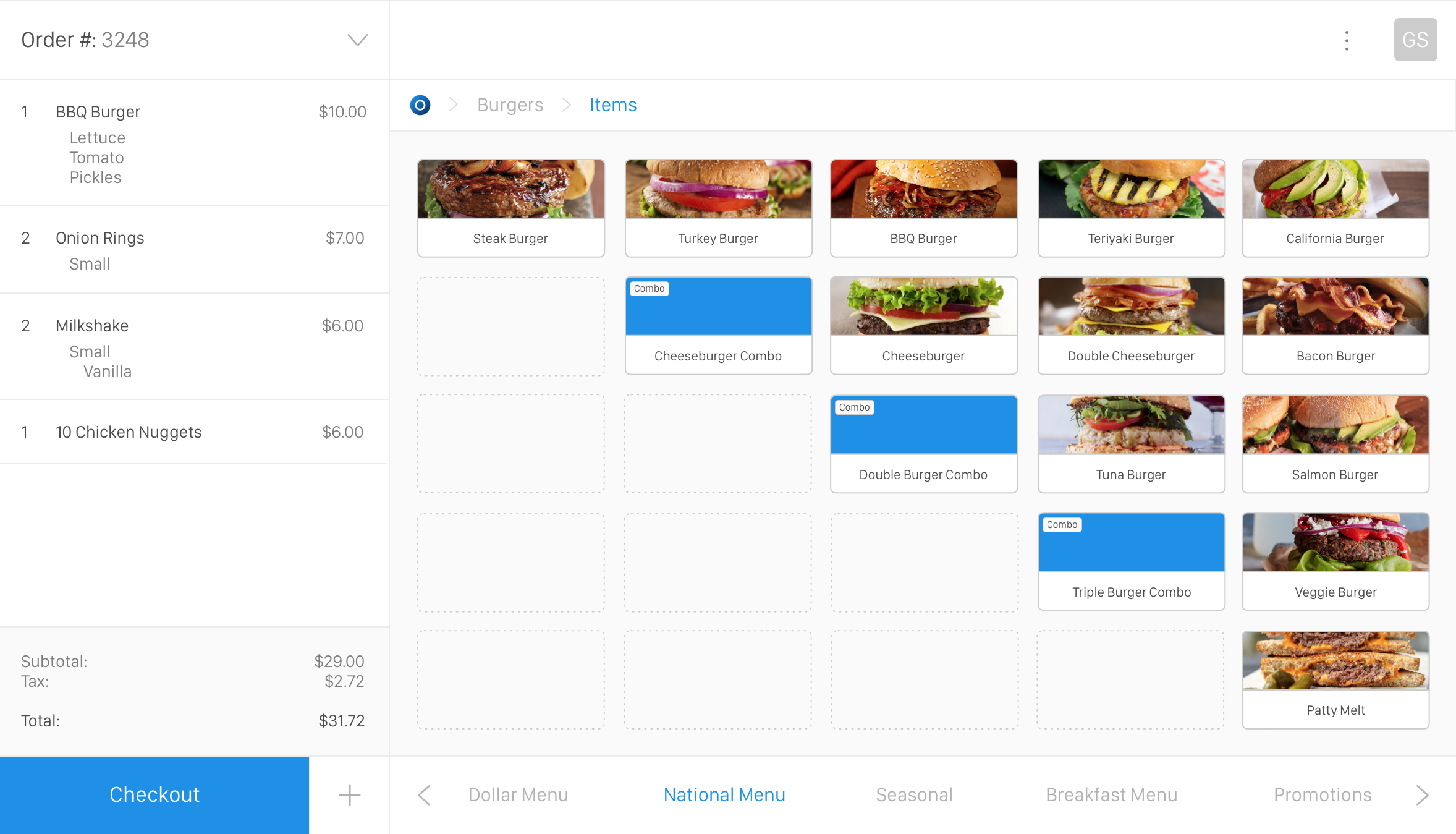
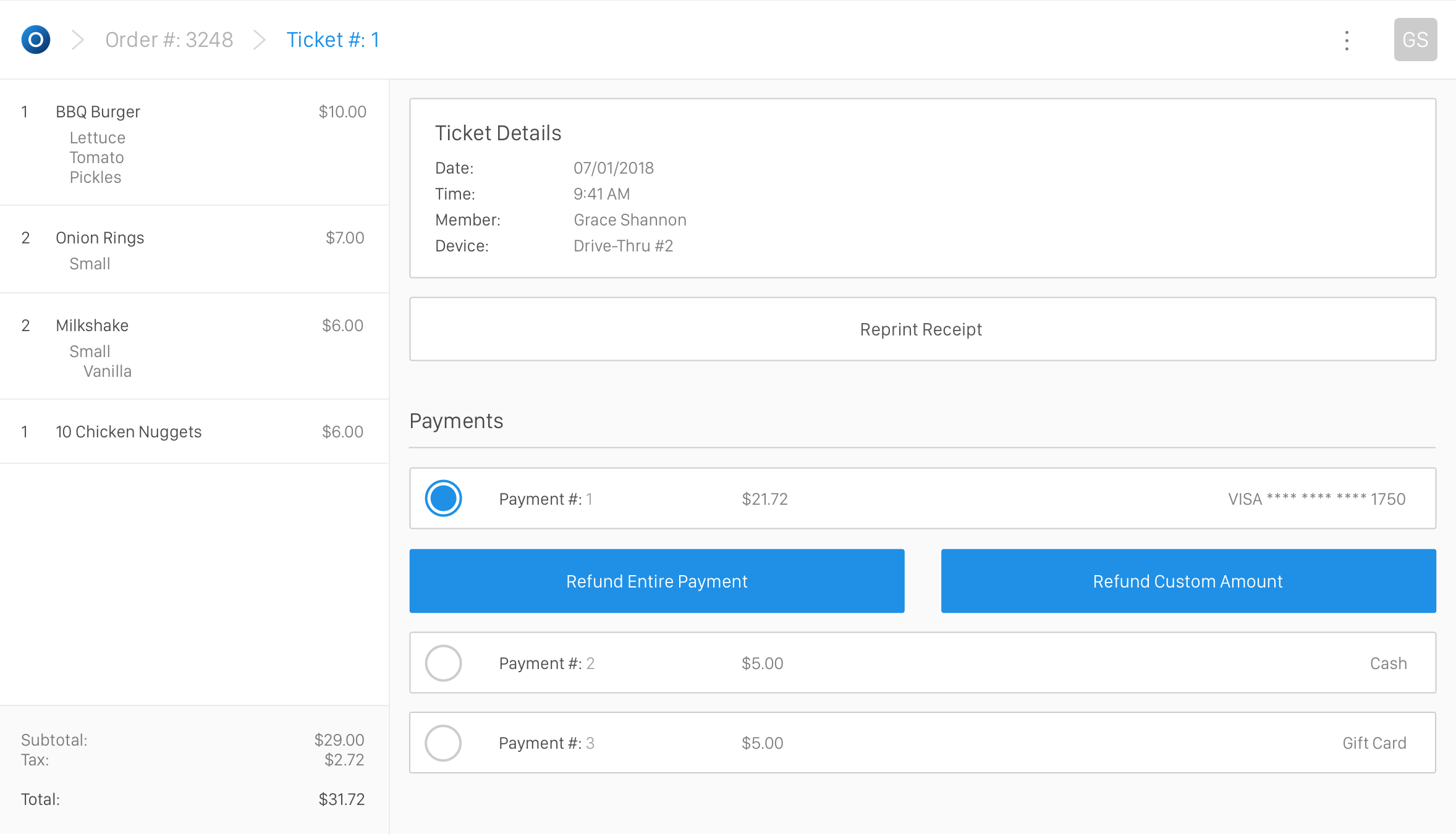
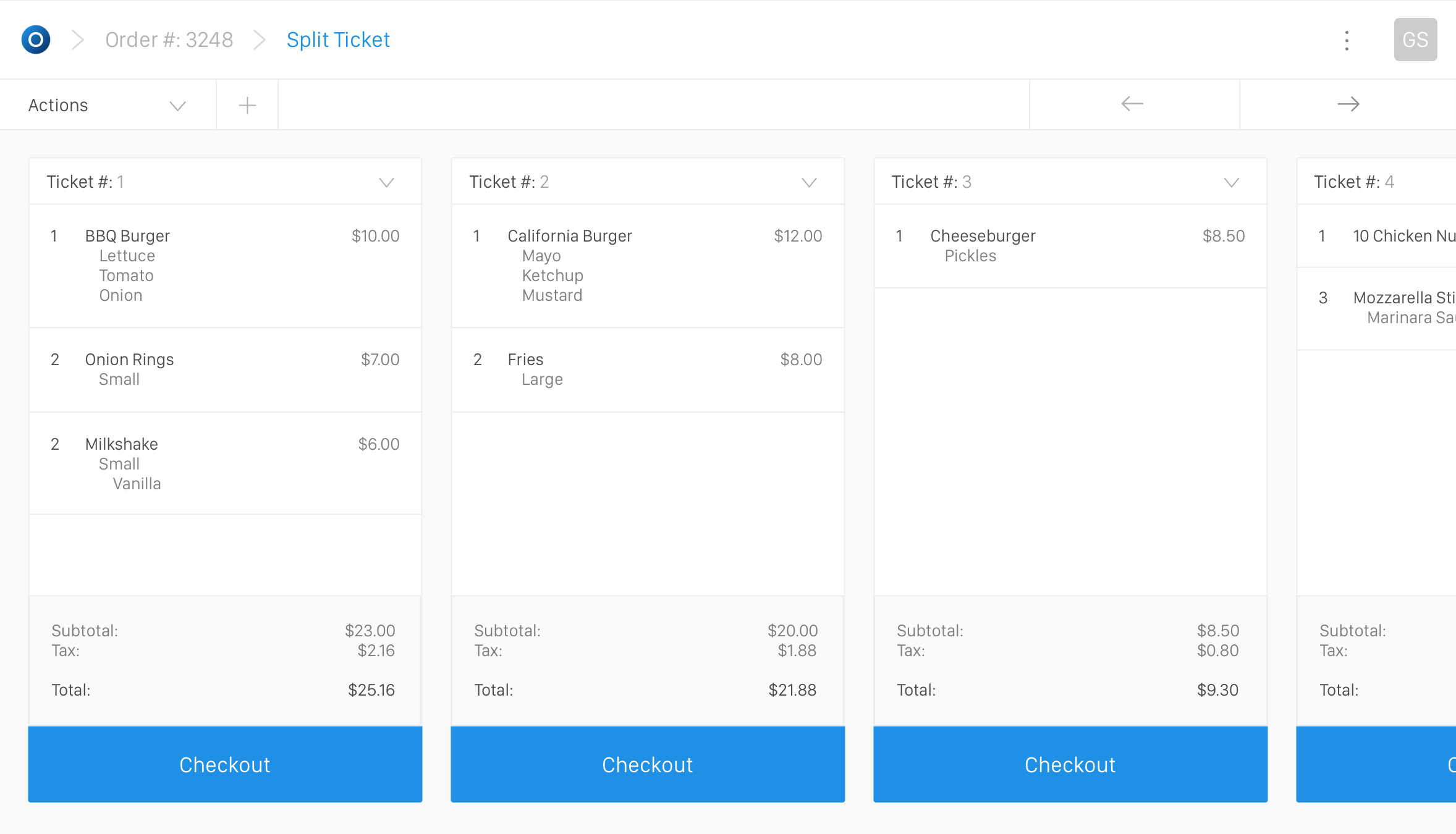
Connected PoS Solution
Collaboration with the development of a modern connected PoS solution, including: terminal frontend application, backend API design, peripherals configuration and setup, etc.
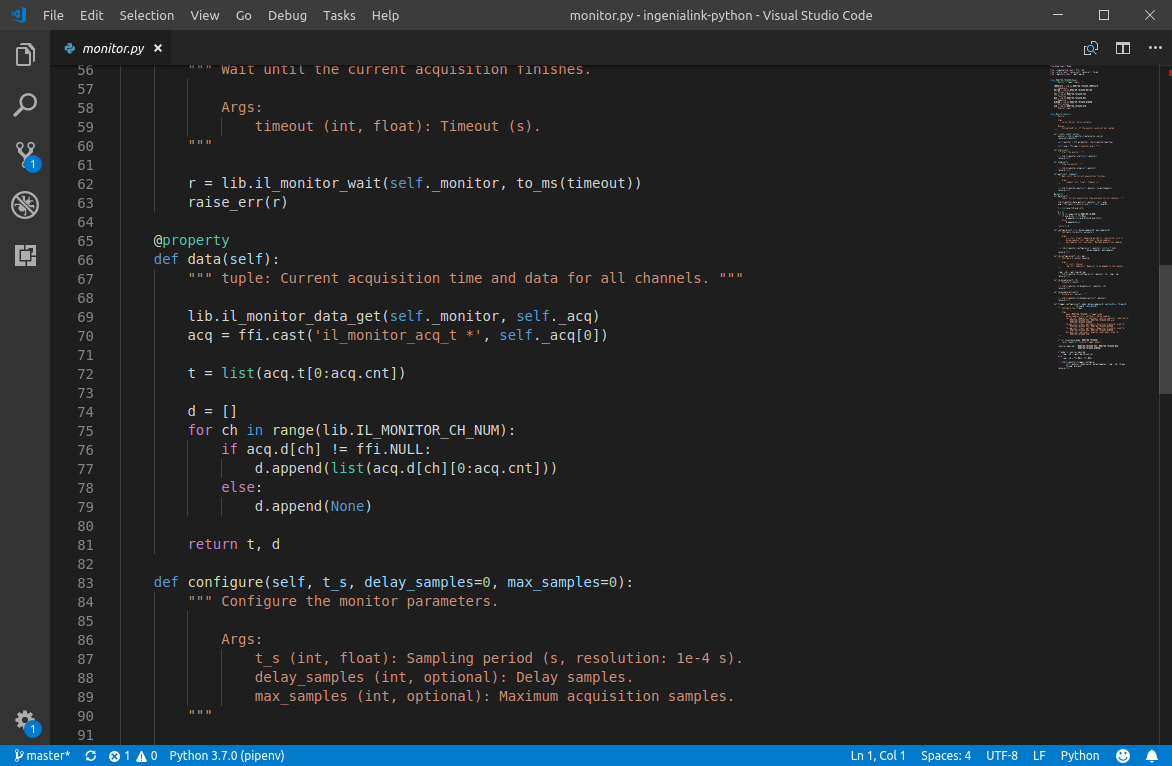
Open Source Motion Control Libraries
Open source motion control library including: device detection and monitoring, precise register polling, position/velocity/torque control, etc. Base library is multiplatform and written in pure C. A native Python library is also provided for easy prototyping.
Magnetometer Calibration and Orientation Estimation
Algorithm for magnetometer calibration and estimation of orientation angles (Roll, Pitch, Yaw) using a magnetometer and an accelerometer.
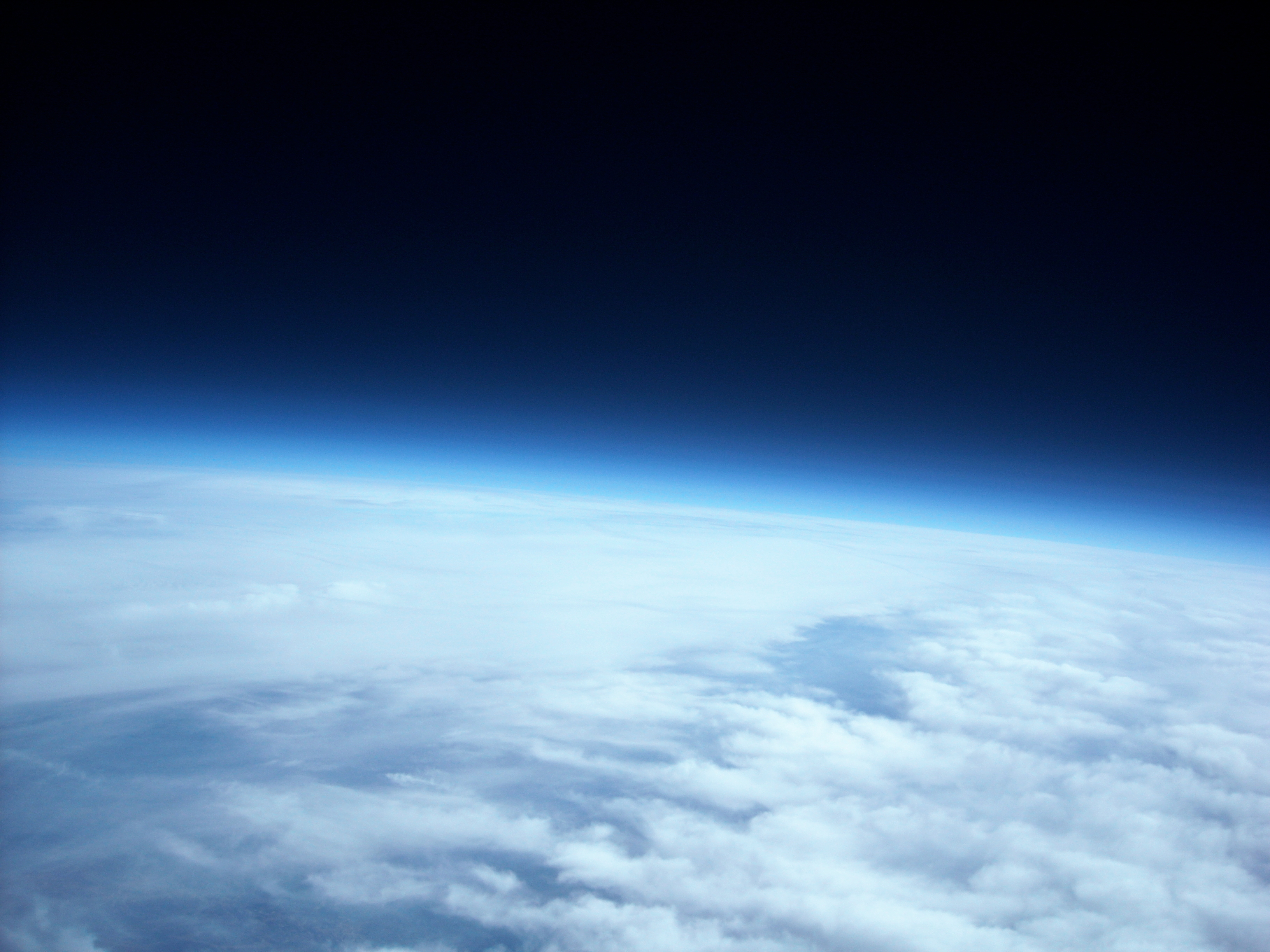
Historical
Our passion for Engineering comes from our younghood, when projects such as the Meteotek08 sounding balloon or the MP3 player Openplayer were developed.